


變距機器人手臂治具3D模型_ProE設計_step(stp)文件下載


變距機器人手臂治具
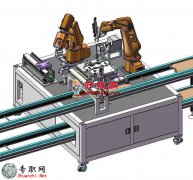
--機器人手臂治具,通過翻轉治具的4面,達到吸取不同工位的目的,減少了關節動作,節約了CT時間,提高了工作效率。
--變距機構通過氣動元件動作,將一模五穴的中心距從35mm變為50mm,從而節約了時間。
變距機器人手臂治具
--機器人手臂治具,通過翻轉治具的4面,達到吸取不同工位的目的,減少了關節動作,節約了CT時間,提高了工作效率。
--變距機構通過氣動元件動作,將一模五穴的中心距從35mm變為50mm,從而節約了時間。





 紗筒轉運車RGV小車3D模型圖紙_So
紗筒轉運車RGV小車3D模型圖紙_SolidW
紗筒轉運車RGV小車3D模型圖紙_So
紗筒轉運車RGV小車3D模型圖紙_SolidW
 非標自動化筆記本鎖螺絲機3D模型
非標自動化筆記本鎖螺絲機3D模型_Sol
非標自動化筆記本鎖螺絲機3D模型
非標自動化筆記本鎖螺絲機3D模型_Sol
 自動化折彎激光焊接設備3D模型_S
自動化折彎激光焊接設備3D模型_Solid
自動化折彎激光焊接設備3D模型_S
自動化折彎激光焊接設備3D模型_Solid
 A10-Tray自動上料抓取工位3D模型
A10-Tray自動上料抓取工位3D模型_Sol
A10-Tray自動上料抓取工位3D模型
A10-Tray自動上料抓取工位3D模型_Sol